


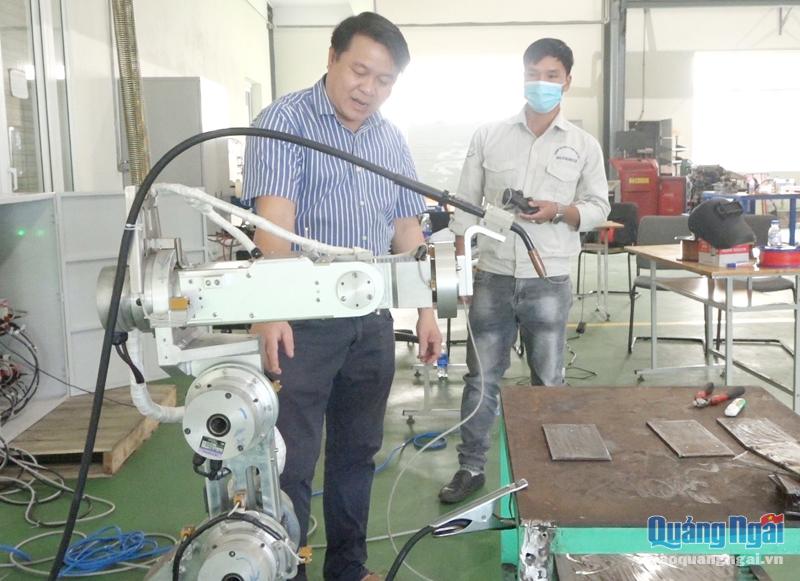
Robot Hàn Tự Động 6 Bậc Trường Cao đẳng Kỹ nghệ Dung Quất
(Báo Quảng Ngãi)- Để sử dụng vào việc giảng dạy, học tập, đào tạo nghề cho sinh viên, từng bước làm chủ công nghệ và thay thế hàng nhập ngoại trong sản xuất công nghiệp, nhất là các thiết bị hạng nặng với kỹ thuật nối mối hàn cao nhất, sau 3 năm nghiên cứu, Trường Cao đẳng Kỹ nghệ Dung Quất đã chế tạo thành công robot hàn tự động 6 bậc.
Đặt câu hỏi hoặc nhận báo giá
.jpg)
Việc đưa robot hàn tự động 6 bậc vào sử dụng không chỉ nâng cao kiến thức thực tiễn cho học viên khi học nghề mà còn tạo thay đổi lớn trong phát triển công nghiệp hàn nối trên địa bàn tỉnh...
Điểm mới trong nghiên cứu robot
Thời gian qua, nhu cầu sử dụng robot hàn trong thi công các công trình có yếu tố phức tạp rất lớn và là xu hướng tất yếu của doanh nghiệp toàn cầu. Tại Việt Nam, nhu cầu cao hơn bởi nước ta đang trong giai đoạn phát triển mạnh, nhất là các ngành sản xuất công nghiệp. Với điều kiện nhân lực và vật lực trong nước, các nghiên cứu trong nước không thể phủ khắp các dạng và chủ đề khác nhau của robot. Trước thực tế đó, Trường Cao đẳng Kỹ nghệ Dung Quất đã hướng đến một phần nền tảng của robot hàn khi tiến hành nghiên cứu, thiết kế và chế tạo robot hàn 6 bậc.
Thạc sĩ Nguyễn Tấn Tại, thành viên nhóm nghiên cứu cho biết, để chế tạo robot hàn tự động 6 bậc, từ tháng 4/2019 - 10/2021, nhóm nghiên cứu đã phải thực hiện nhiều công đoạn. Cụ thể, nghiên cứu chuyên môn với ba phần: Thiết kế cơ khí, thiết kế hệ thống điều khiển, viết chương trình mô phỏng. Sau đó, nhóm nghiên cứu tiếp tục gia công phần cơ khí; tiến hành lắp ráp robot; vận hành thử nghiệm, kiểm tra và hiệu chỉnh robot.
“Trong quá trình thiết kế cơ khí cho robot, nhóm hướng đến việc xây dựng hoàn chỉnh mô hình động học và động lực học. Xác định các thông số động lực học của các chi tiết, xây dựng hệ phương trình động lực học, lập trình giải tìm đáp ứng động học thuận, lập trình giải tìm đáp ứng động học ngược, kiểm tra đáp ứng động lực học, xác định các thông số phù hợp cho các chi tiết, xác định moment xoắn động lực trên các khớp, tải trọng động tác dụng lên robot, thiết lập hàm truyền cho robot phục vụ cho chức năng điều khiển.
Mô hình động lực học này có kể đến chuyển động và kích thước 3 chiều của các khâu, đây là điểm mới của đề tài ở khía cạnh mô hình động lực học làm nền tảng cho việc phân tích kết cấu cả tĩnh lẫn động cho robot bằng phần mềm ANSYS (bài toán dạng này chưa được giải quyết chi tiết trong các nghiên cứu trong nước) và tìm hàm truyền cho điều khiển robot. Đồng thời, thiết kế các khâu, thiết kế các khớp, thiết kế khung cho robot, thiết kế, lắp ghép toàn bộ robot trên phần mềm CAD 3D, kiểm tra lại động học, giải pháp kỹ thuật gia công chế tạo và lắp ráp”, ông Tại cho hay.
Theo ông Tại, ở phần thiết kế hệ thống điều khiển, đề tài thiết kế hệ thống điều khiển chung cho 6 khâu, hệ thống giám sát và an toàn; xây dựng thuật toán điều khiển cho toàn bộ robot; thiết kế xây dựng một bộ dữ liệu chuẩn cho đường thẳng, xây dựng một bộ dữ liệu chuẩn cho cung tròn, một bộ dữ liệu chuẩn cho đường tròn, một bộ dữ liệu chuẩn cho đường bất kỳ; thiết kế mạch điều khiển từng khâu trên robot, mạch điều khiển toàn bộ cho robot, mạch an toàn trên robot. Sau khi thiết kế cơ khí, hệ thống điều khiển và viết chương trình mô phỏng, đề tài tiến hành gia công cơ khí các chi tiết cho các khâu robot (gồm khâu đế và khâu 1 đến khâu 6); lắp ráp mạch điều khiển cho robot, kết cấu và cân chỉnh robot; vận hành, thử nghiệm, kiểm tra và hiệu chỉnh robot. Đế trụ của tay máy được gắn cố định, các khớp xoay kết hợp giữa các khâu với nhau.
Thành quả khoa học của trường nghề
Sau 3 năm nghiên cứu và chế tạo, đề tài cho ra sản phẩm là một robot hàn tự động 6 bậc, với các đặc điểm kỹ thuật kiểu 6 khớp quay dạng đứng. Số trục là 6; tải trọng tối đa 3,5kg, chiều cao 500mm, vùng không gian làm việc dạng khối cầu có bán kính 500mm và phạm vi làm việc 500mm. Góc hoạt động: F1 = 2700; F2 = 1500; F3 = 1800; F4 = 1800; F5 = 2700; F6 = 2700. Sai số vị trí: Sai số lặp lại ± 1mm.
Theo nhóm nghiên cứu, robot có khả năng hàn điểm và đường. Sử dụng phương pháp hàn Mig với dòng hàn 500A, có khả năng lưu trữ tối đa 10 chương trình hoạt động. Robot hàn 6 bậc tự do được đặc trưng bởi các khớp xoay và các khâu, bao gồm 6 khớp xoay trong đó có 3 khớp quay đồng trục giúp cho robot hoạt động hiệu quả hơn. Ngôn ngữ sử dụng của máy bao gồm cả tiếng Anh và tiếng Việt nên rất thuận tiện đối với đối tượng sử dụng là người Việt Nam. Bên cạnh đó, qua quá trình nghiên cứu và hoàn chỉnh robot, nhóm đã biên soạn thành công các tài liệu giảng dạy môn robot công nghiệp và tài liệu kỹ thuật cho máy.
.jpg)
Thạc sĩ Dương Văn Toàn Ninh, chủ nhiệm đề tài cho biết, đề tài đã nghiên cứu, tham khảo các loại robot đã được nghiên cứu trong nước và quốc tế. Trong đó, phần nghiên cứu cơ khí có hàm lượng học thuật cao. Việc tính toán điểm, đường hàn được thực hiện bằng lập trình điều khiển và giải thuật nội suy. Chương trình điều khiển và mô phỏng động học, động lực học robot do nhóm tác giả tự viết có độ chính xác cao, không sử dụng các phần mềm hiện có trên thế giới, phần mềm có giao diện thân thiện, dễ vận hành sử dụng, đặc biệt với đối tượng sử dụng là người Việt Nam. Phần cứng, nhóm nghiên cứu ứng dụng công nghệ máy tính nhúng nhằm tương tác với màn hình hiển thị HMI và dễ dàng cho việc sử dụng các phần mềm lập trình cấp cao như: C, Visual, Matlab, đồng thời thuận lợi cho việc giao tiếp với các phần mềm CAD.
“Hệ thống tài liệu đáp ứng yêu cầu phục vụ đào tạo môn học robot công nghiệp cho trình độ trung cấp và cao đẳng trong giáo dục nghề nghiệp. Tuy nhiên, hiện robot vẫn còn các hạn chế như: Vật liệu dùng để chế tạo robot là nhôm và thép làm cho trọng lượng của robot lớn, gây nên lực quán tính lớn, vì vậy tính linh hoạt của robot không cao. Bên cạnh đó, các khâu của robot dùng công nghệ gia công trực tiếp trên các máy gia công cắt gọt nên tính thẩm mỹ không cao so với công nghệ đúc, vì vậy khả năng đi dây hơi rườm rà. Hiện nhóm đang tập trung khắc phục để đảm bảo một robot hoàn chỉnh”, ông Ninh thông tin.
“Đam Mê, Hành Động & Không Ngừng Nỗ Lực !”
 |
 |
 |
.png) |
|
| RPMEC Automation |
Doosan Robotics Việt Nam |
RPMEC Automation ATE |
RPMEC Thủy Lực |
Kết Nối |

